HK380 Komputila CNC Panel Segilo
HK380 Komputila CNC Panel Segilo
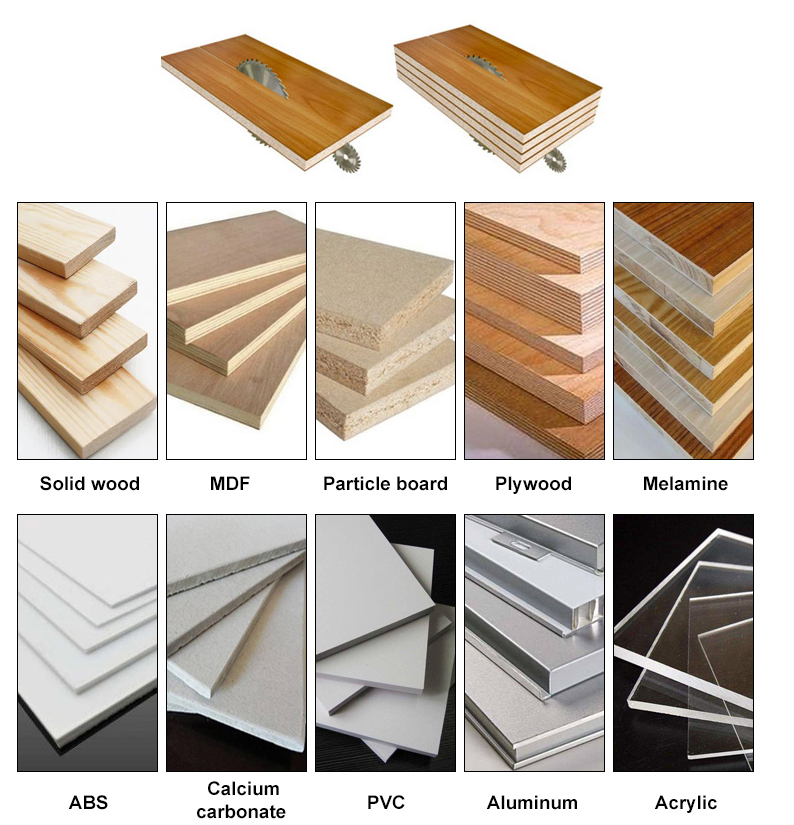
1. Laŭ la eniga telelarĝo, tranĉu la bezonatan teleron kaj rapide revenu al la originala laborstato.
2. Tranĉa rapideco estas regata de frekvenca konvertilo, kiu povas venki platojn de malsama dikeco kaj malsamaj materialoj.
3. La nutrado adoptas pneŭmatikan flosan bidan tablon, kaj la peza plato materialo estas facile ŝanĝi. La roboto aŭtomate manĝas, havas malaltan laborintensecon kaj altan produktan efikecon.
4. Uzu importitan Delta servomotoron por forigi artefaritan eraron kaj plibonigi dimensian precizecon.
| KS-829CP | PARAMETRO |
| Maksimuma Tranĉa rapideco | 0-80 m/min |
| Maksimuma Transportisto Maksimuma Rapido | 100 m/min |
| Ĉefa Segilo Motor Power | 16.5kw (laŭvola 18.5kw) |
| Tuta Potenco | 26.5kw (laŭvola 28.5kw) |
| Maksimuma Laborgrando | 3800L * 3800W * 100H (mm) |
| Minimuma Laborgrando | 34L * 45W (mm) |
| Entuta Grandeco | 6300x7500x1900mm |
Plenumu la postulojn de granda telera prilaborado, kun maksimuma segilgrandeco de 3800 * 3800mm kaj segdikeco de 105mm, kaj pli larĝa aplikebleco.
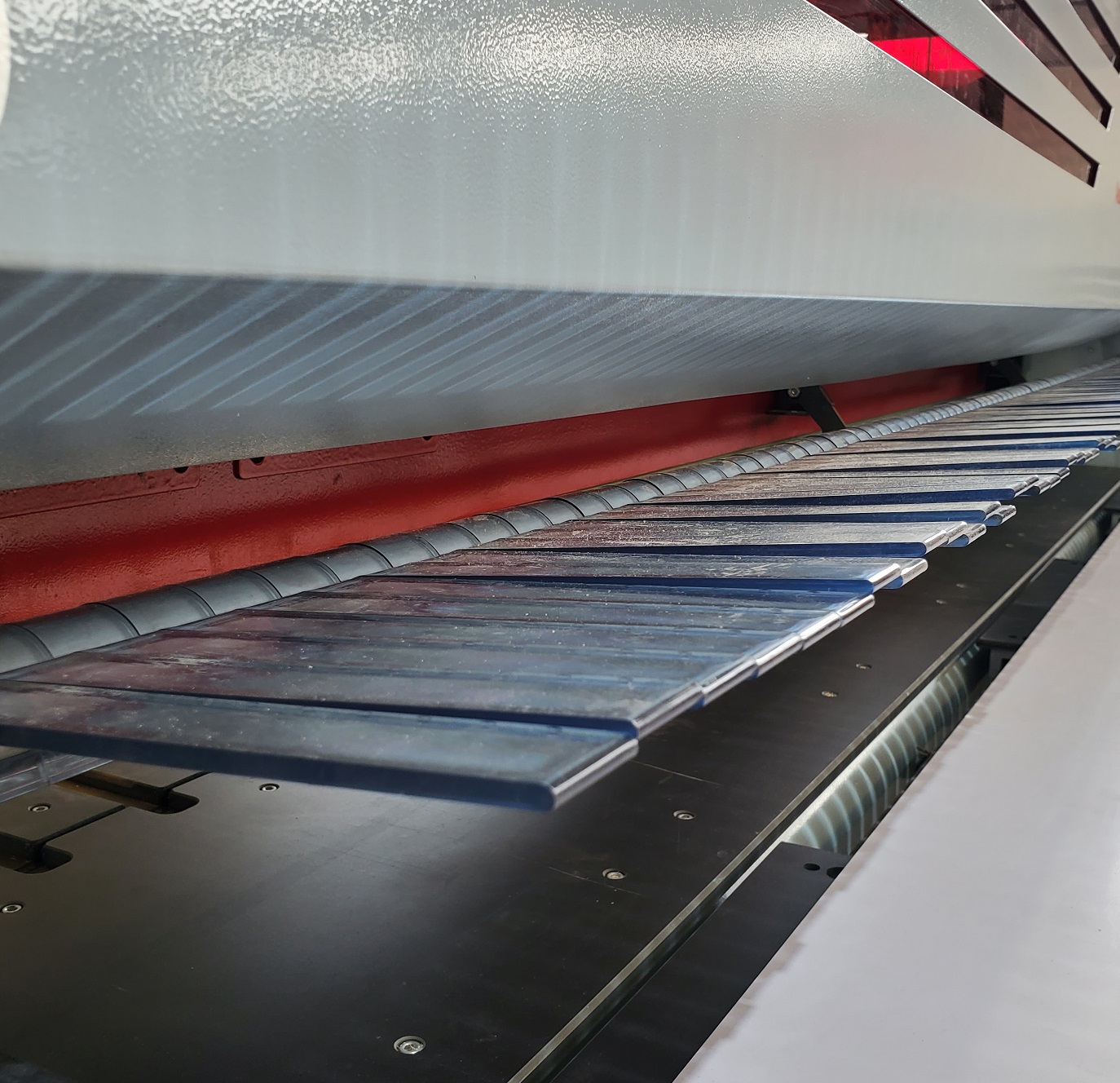
Maŝina detalo
Plenumu la postulojn de granda telera prilaborado, kun maksimuma seggrandeco de 3800 * 3800mm kaj segdikeco de 105mm, kaj pli larĝa aplikebleco.

Servomekanika krampo mano
11 plej granda dezajno mekanika klipo

La robota brako adoptas alt-precizecan verman ilarreduktilon kaj nutrantan ilaron, kun tranĉa precizeco de ± 0.1mm.

La labortablo estas farita el Pneŭmatika flosanta platformo. Estas tre facile movi la panelojn.

Poenta segilo povus esti aŭtomate ŝanĝita laŭ la bezonoj de segado. Kunlaboru kun la ĉefa segilo por altkvalita segado.
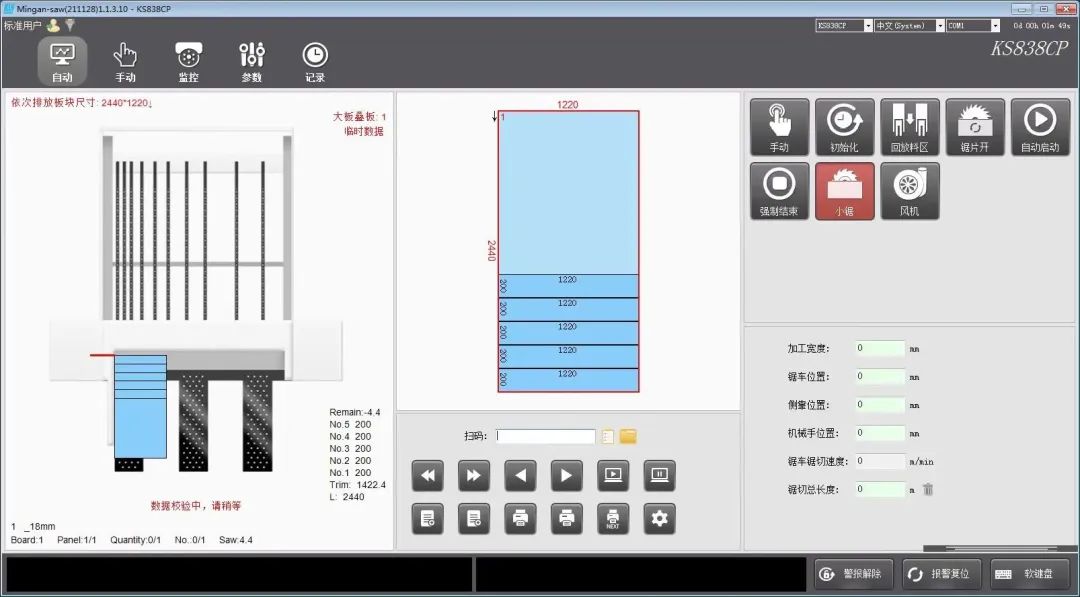
Laŭvola optimumiga programaro por aŭtomata optimumigo de materiala aranĝo kaj segado.
Specimeno